# P7:MIPS 微系统设计
通过阅读本文,您可以大致了解 2021 年秋季北航计算机组成课程 P7 课下搭建的思路,以及课上测试的题目内容、难度和解题思路
P7 课上测试的主要内容是对课下用 Verilog 搭建的 MIPS 微系统进行强测,同时添加一条新指令
题目每年都会发生变化,题意描述可能与原题有一定差异
本文的目的在于解释一下本就说的不是很明白的教程,然后谈一谈我的理解,并不一定完全正确,最终还是应当以教程、高老板 PPT 和《See MIPS Run Linux》为准
::: 结束了,不用每周都去课上考试了!:::
# 课下设计概述
要求实现的指令集为 MIPS-C4 ,即 LB、LBU、LH、LHU、LW、SB、SH、SW、ADD、ADDU、 SUB、SUBU、MULT、MULTU、DIV、DIVU、SLL、SRL、SRA、SLLV、 SRLV、SRAV、AND、OR、XOR、NOR、ADDI、ADDIU、ANDI、ORI、 XORI、LUI、SLT、SLTI、SLTIU、SLTU、BEQ、BNE、BLEZ、BGTZ、 BLTZ、BGEZ、J、JAL、JALR、JR、MFHI、MFLO、MTHI、MTLO、MFC0、MTC0、ERET,在 P6 的基础上新增加了 MFC0、MTC0、ERET
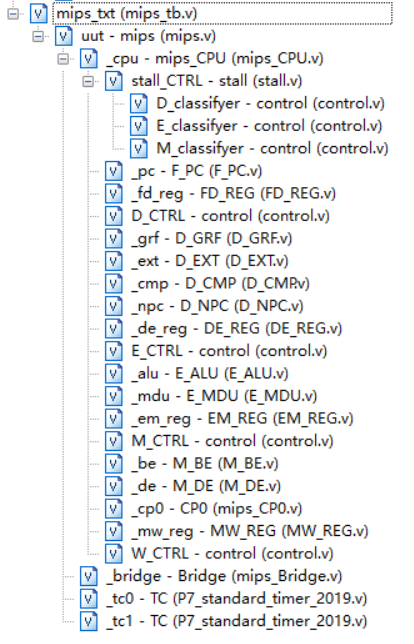
整体结构目录树如下:
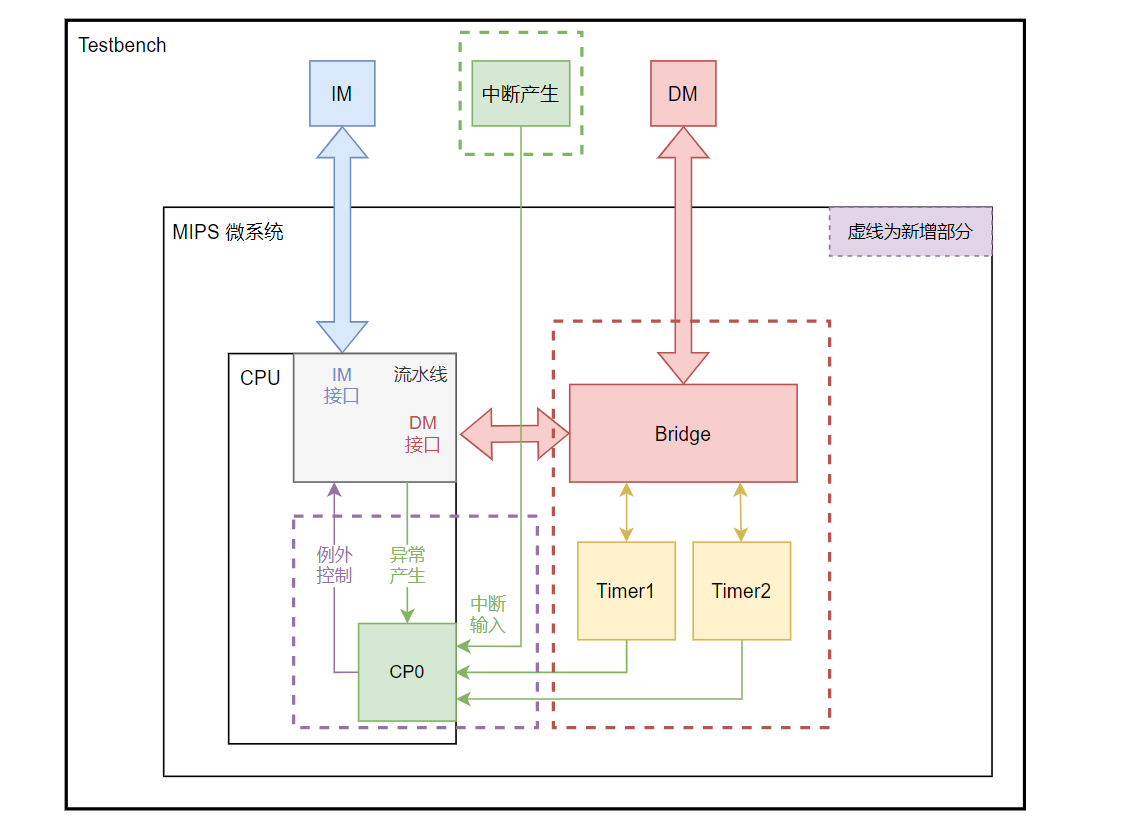
MIPS 微系统整体设计如下图(图片来源:2021 秋季计组教程)
P7 最难的就是课下,课下完成之后,课上就是三个提交窗口对课下进行强测,加一条指令,四过三即可
更难的是要读懂教程,因此这篇文章将尝试解读一下教程里面的内容
P7 主要还是要做三件事:更改流水线各级使之可以产生异常,添加 CP0 处理异常,添加 Bridge 与两个外设(计时器)交互,这三件事建议从前往后一件一件的做
首先对异常和中断的处理有一个整体的理解,可以理解成我们添加了两种新的跳转指令,第一种跳转的条件是指令执行时产生异常或者外部、外设发出了中断信号,跳转的位置是固定的 0x4180 ,至于怎么响应中断,怎么处理异常,从 0x4180 开始都是软件写好的,我们无需关心,跳转时要把相应的当前指令地址(如果是延迟槽的话就是当前指令地址 - 4)写入 EPC,第二种跳转条件是遇到 eret 指令,我们需要从当前位置跳回 EPC 中的地址,同时 ** eret 后面的指令不能被执行 **
第一种情况需要更改流水线各级,使之可以产生异常,发生异常之后,我们把异常信号一直传递到 M 级的 CP0,CP0 负责决定是否接受并处理这个异常,如果 CP0 决定处理,这时就需要进行跳转行为
第二种情况对于 eret 的处理,我们是在 D 级判断,如果出现 eret 指令,就需要置位 F_PC 和 NPC 分别为 EPC 和 EPC+4(想一想为什么要置位 NPC?)
对于异常的处理,按照教程,我们需要处理的异常包括下面几种
| 异常与中断码 | 助记符与名称 | 指令与指令类型 | 描述 |
|---|---|---|---|
| 0 | Int (外部中断) | 所有指令 | 中断请求,来源于计时器与外部中断 |
| 4 | AdEL (取指异常) | 所有指令 | PC 地址未字对齐 |
| 4 | AdEL (取指异常) | 所有指令 | PC 地址超过 0x3000 ~ 0x6ffc |
| 4 | AdEL (取数异常) | lw | 取数地址未与 4 字节对齐 |
| 4 | AdEL (取指异常) | lh , lhu | 取数地址未与 2 字节对齐 |
| 4 | AdEL (取指异常) | lh , lhu , lb , lbu | 取 Timer 寄存器的值 |
| 4 | AdEL (取指异常) | load 型指令 | 计算地址时加法溢出 |
| 4 | AdEL (取指异常) | load 型指令 | 取数地址超出 DM、Timer0、Timer1 的范围 |
| 5 | AdES (存数异常) | sw | 存数地址未 4 字节对齐 |
| 5 | AdES (存数异常) | sh | 存数地址未 2 字节对齐 |
| 5 | AdES (存数异常) | sh , sb | 存 Timer 寄存器的值 |
| 5 | AdES (存数异常) | store 型指令 | 计算地址加法溢出 |
| 5 | AdES (存数异常) | store 型指令 | 存数地址超出 DM、Timer0、Timer1 的范围 |
| 10 | RI (未知指令) | - | 未知的指令码 |
| 12 | Ov (溢出异常) | add , addi , sub | 算术溢出 |
则可以发现我们要处理的部分包括 F 级的 IFU 部分,D 级的 Control 译码部分和 E 级的 ALU 部分以及最难的 M 级的 DM 部分
直接放出对应的代码块供参考
// ------ IFU ------ | |
wire [31:0] tmp_F_PC; | |
F_PC _pc( | |
.clk(clk), | |
.reset(reset), | |
.Req(Req), | |
.PC_WrEn(PC_WrEn), | |
.NPC(NPC), | |
.PC(tmp_F_PC) | |
); | |
assign F_PC = D_eret ? EPC : tmp_F_PC; | |
assign F_EXC_AdEL = ((| F_PC[1:0]) | (F_PC < 32'h0000_3000) | (F_PC > 32'h0000_6ffc)) && !D_eret; | |
assign i_inst_addr = F_PC; | |
assign F_Instr = (F_EXC_AdEL) ? 32'd0 : i_inst_rdata; | |
// ----------------- |
可以看到关键在于对 F_EXC_AdEL 的赋值,为什么要向 PC 中传入 Req(中断请求)呢?显然是因为上面的第二条,如果出现中断 PC 需要立刻变成 0x4180;此外,按照要求,如果出现异常,向后提交的 Instr 应当是 0,所以会有最后一句
对于 D 级的不认识的指令异常,我们直接在 Control 里面修改,如果有无法译码的指令,直接连出来一个信号表示异常
assign D_EXC_RI = !(beq | bne | bgez | bgtz | blez | bltz | | |
j | jal | jalr | jr | | |
lb | lbu | lh | lhu | lw | sb | sh | sw | | |
lui | addi | addiu | andi | ori | xori | slti | sltiu | | |
add | addu | sub | subu | And | Nor | Or | Xor | ori | slt | sltu | | |
sll | sllv | sra | srav | srl | srlv | | |
((opcode == 6'b000000) && (funct==6'b000000)) | | |
div | divu | mfhi | mflo | mthi | mtlo | mult | multu | | |
mtc0 | mfc0 | eret); |
有些实现方式可能需要考虑 sll 和 nop 的问题,但是我貌似就不用,这里提醒一下
对于 ALU 的溢出检测,由于我们需要同时检测算术溢出和取值地址计算溢出,因此有两个,我们传入 ALU 的信号需要包括应当检测哪种类型的溢出,因此输入端口的定义如下,前两个输入就是检测什么溢出,后两个输出表示是否检测到异常:
module E_ALU( | |
input ALUDMOv, | |
input ALUAriOv, | |
input [31:0] A, | |
input [31:0] B, | |
input [3:0] ALUOp, | |
output reg [31:0] C, | |
output EXC_AriOv, | |
output EXC_DMOv | |
); |
内部这样改,反正都差不多,直接放代码出来
wire [32:0] ext_A = {A[31], A}, ext_B = {B[31], B}; | |
wire [32:0] ext_add = ext_A + ext_B; | |
wire [32:0] ext_sub = ext_A - ext_B; | |
assign EXC_AriOv = (ALUAriOv) && | |
((ALUOp == `ALU_add && ext_add[32] != ext_add[31]) || | |
(ALUOp == `ALU_sub && ext_sub[32] != ext_sub[31])); | |
assign EXC_DMOv = (ALUDMOv) && | |
((ALUOp == `ALU_add && ext_add[32] != ext_add[31]) || | |
(ALUOp == `ALU_sub && ext_sub[32] != ext_sub[31])); |
M 级的检测主要是条件很多,需要对照着逐一检测,下面分别给出 BE 和 DE 里面检测储存和读取的异常检测
这个是储存的
wire ErrAlign = ((BEOp == `BE_sw) && (|Addr[1:0])) || | |
((BEOp == `BE_sh) && (Addr[0])); | |
wire ErrOutOfRange = !(((Addr >= `StartAddrDM) && (Addr <= `EndAddrDM)) || | |
((Addr >= `StartAddrTC1) && (Addr <= `EndAddrTC1)) || | |
((Addr >= `StartAddrTC2) && (Addr <= `EndAddrTC2))); | |
wire ErrTimer = (Addr >= 32'h0000_7f08 && Addr <= 32'h0000_7f0b) || | |
(Addr >= 32'h0000_7f18 && Addr <= 32'h0000_7f1b) || | |
(BEOp != `BE_sw && Addr >= `StartAddrTC1); | |
assign M_EXC_AdES = (store) && (ErrAlign || ErrOutOfRange || ErrTimer || M_EXC_DMOv); |
这个是读取的
wire ErrAlign = ((DEOp == `DE_lw) && (|Addr[1:0])) || | |
((DEOp == `DE_lh || DEOp == `DE_lhu) && (Addr[0])); | |
wire ErrOutOfRange = !(((Addr >= `StartAddrDM) && (Addr <= `EndAddrDM)) || | |
((Addr >= `StartAddrTC1) && (Addr <= `EndAddrTC1)) || | |
((Addr >= `StartAddrTC2) && (Addr <= `EndAddrTC2))); | |
wire ErrTimer = (DEOp != `DE_lw) && (Addr >= `StartAddrTC1); | |
assign M_EXC_AdEL = (load) && (ErrAlign || ErrOutOfRange || ErrTimer || M_EXC_DMOv); |
宏自己定义去,我就不放了
现在我们就实现了下图中的检测功能
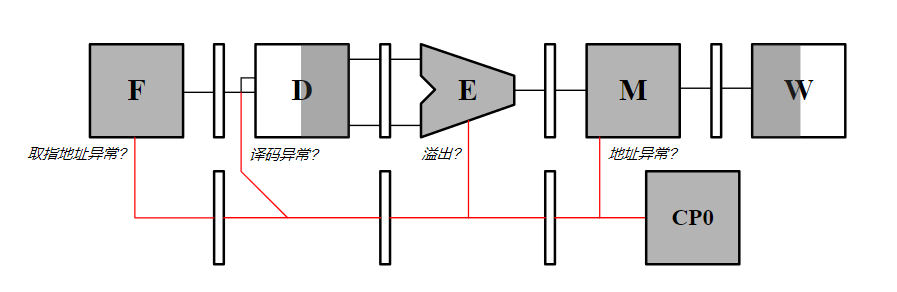
下面我们需要实现的是图中红线的功能,即异常码随流水线传递,直至提交到 CP0,注意如果一条指令出现多个异常以先出现的为准,具体在下面代码可以看出
// D 级 | |
assign D_EXCCode = tmp_D_EXCCode ? tmp_D_EXCCode : | |
D_EXC_RI ? `EXC_RI : | |
`EXC_None; | |
// E 级 | |
assign E_EXCCode = (tmp_E_EXCCode) ? tmp_E_EXCCode : | |
(E_EXC_AriOv) ? `EXC_Ov : | |
`EXC_None; | |
// M 级 | |
assign M_EXCCode = (tmp_M_EXCCode) ? tmp_M_EXCCode : | |
(M_EXC_AdES) ? `EXC_AdES : | |
(M_EXC_AdEL) ? `EXC_AdEL : | |
`EXC_None; |
注意对于处于延迟槽中的指令,我们的 EPC 需要在 CP0 中特殊处理,因此当前指令是否在延迟槽内,我们需要新开一个信号 isInDelaySlot 跟着一起流水,另外对于阻塞插入的 nop,PC 值和 isInDelaySlot 都不正确,因此我们需要在 DE 流水线寄存器中特殊处理,利用下面的代码即可解决问题
if(flush || reset || Req || Stall) begin | |
E_PC <= Stall ? D_PC : (Req ? 32'h0000_4180: 32'd0); | |
E_Instr <= 32'd0; | |
E_rs_data <= 32'd0; | |
E_rt_data <= 32'd0; | |
E_ext32 <= 32'd0; | |
E_b_jump <= 0; | |
E_DelaySlot <= Stall ? D_DelaySlot : 0; | |
E_EXCCode <= 0; | |
end |
我们既然已经实现了异常的检测与传递,下面就是 P7 异常处理的核心 CP0 处理器,它负责接受前面传来的异常信号和外部传入的中断信号,然后综合分析决定是否响应这个异常
# CP0 协处理器
介绍
协处理器 0,包含 4 个 32 位寄存器,用于支持中断和异常。
端口定义
| 端口 | 输入 / 输出 | 位宽 | 描述 |
|---|---|---|---|
| A1 | I | 5 | 指定 4 个寄存器中的一个,将其存储的数据读出到 RD |
| A2 | I | 5 | 指定 4 个寄存器中的一个,作为写入的目标寄存器 |
| Din | I | 32 | 写入寄存器的数据信号 |
| PC | I | 32 | 目前传入的下一个 EPC 值 |
| ExcCodeIn | I | 5 | 目前传入的下一个 ExcCode 值 |
| isInDelaySlot | I | 32 | 目前传入的下一个 BD 值 |
| HWInt | I | 6 | 外部硬件中断信号 |
| WE | I | 1 | 写使能信号,高电平有效 |
| EXLClr | I | 1 | 传入 eret 指令时将 SR 的 EXL 位置 0 ,高电平有效 |
| clk | I | 1 | 时钟信号 |
| reset | I | 1 | 同步复位信号 |
| Req | O | 1 | 输出当前的中断请求 |
| EPCOut | O | 32 | 输出当前 EPC 寄存器中的值 |
| Dout | O | 32 | 输出 A 指定的寄存器中的数据 |
| TestIntResponse | O | 1 | 检测 CPU 是否对外部中断产生响应,从而决定是否去写 0x0000_7f20 |
功能定义
| 序号 | 功能名称 | 功能描述 |
|---|---|---|
| 1 | 同步复位 | 当时钟上升沿到来且同步复位信号有效时,将所有寄存器的值设置为 0 |
| 2 | 读数据 | 读出 A1 地址对应寄存器中存储的数据到 RD;当 WE 有效时会将 WD 的值会实时反馈到对应的 RD,当 ERET 有效时会将 EXL 置 0,即内部转发。 |
| 3 | 写数据 | 当 WE 有效且时钟上升沿到来时,将 WD 的数据写入 A2 对应的寄存器中。 |
| 4 | 中断处理 | 根据各种传入信号和寄存器的值判断当前是否要进行中断,将结果输出到 IntReq。 |
内部主要干两件事,处理异常中断和管理那四个寄存器(我们只需要实现其中 4 个就行,注意还有两个是只读的,写入应该忽略)
请注意:不管教程和 PPT 写的是啥鬼玩意,那四个寄存器每一个寄存器请务必开满 32 位!!!
否则课上会 GG
管理寄存器就跟乘除槽管理 HI 和 LO 一样,开四个寄存器,然后根据 mfc0 和 mtc0 这两条指令处理他们的值就好
处理异常时需要干下面几件事:
将异常码 ExcCode、是否处于延迟槽中的判断信号 isInDelaySlot 和 ** 当前 PC(如果取指地址异常则传递错误的 PC 值)** 一直跟着流水线到达 M 级直至提交至 CP0,由 CP0 综合判断分析是否响应该异常
如果需要响应该异常,则 CP0 输出 Req 信号置为 1,此时 FD、DE、DM、MW 寄存器响应 Req 信号,清空 Instr,将 PC 值设为 0x4180,然后输入 F 级的 NPC 也被置为 0x4180,下一条指令从 0x4180 开始执行
当外设和系统外部输入中断信号时,CP0 同样也会确认是否响应该中断,然后把 Req 置为 1,执行相同的操作。异常中断同时发生则中断优先!
当系统外部输入中断信号时,CP0 还会输出一个 TestIntResponse 信号指示是否响应外部中断信号,如果响应则系统会相应去写 0x7f20 地址,从而时外部中断信号停止(2021 年新增!)
还有一件事是关于乘除槽的,如果有异常在乘除槽之前被检出,那么就不执行乘除法,简单来说就是开启乘除槽条件在 Start 为 1 的基础上还要加一个 Req 为 0,这一点看一卡代码就行
如果是 eret 指令,那么 EXL 需要置 0,表明当前处于用户态,并没有在处理异常(这时候可以响应别的异常了),对于 eret 指令,我们还需要修改 NPC,因为不管是跳到异常处理程序还是跳回去都需要改变 NPC 的值,具体的改变代码如下:
assign NPC = (Req) ? 32'h0000_4180 : | |
(eret) ? EPC + 4: | |
(NPCOp == `NPC_pc4) ? F_PC + 4 : | |
(NPCOp == `NPC_jr_jalr) ? rs : | |
(NPCOp == `NPC_b && b_jump) ? D_PC + 4 + <!--swig0-->, imm16, 2'b00} : | |
(NPCOp == `NPC_j_jal) ? {D_PC[31:28], imm26, 2'b00} : | |
F_PC + 4; |
对于新加的两条处理 CP0 寄存器的指令,我没加任何转发,只是做了阻塞
只需要在 stall_control 里面加一句话就行:
wire stall_eret = (D_eret) && ((E_mtc0 && E_rd_addr == 5'd14) || (M_mtc0 && M_rd_addr == 5'd14)); |
# Bridge
系统桥是处理 CPU 与外设(两个计时器)之间信息交互的通道
CPU 中 store 类指令需要储存的数据经过 BE 处理后会通过 m_data_addr, m_data_byteen, m_data_wdata 三个信号输出到桥中,桥会根据写使能 m_data_byteen 和地址 m_data_addr 来判断到底写的是内存还是外设,然后给出正确的写使能
load 类指令则是全部把地址传递给每个外设和 DM 中,然后桥根据地址选择从应该反馈给 CPU 从哪里读出来的数据,然后 DE 在处理读出的数据,反馈正确的结果
Bridge 的端口列表如下:
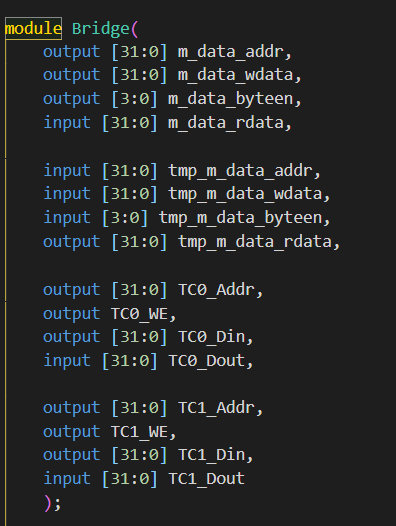
这个很容易加的,直接根据地址选择是读内存还是外设,是传给 CPU 外设读出来的数据还是内存的数据
对于我的设计而言,CPU 仅仅与 Bridge 交互,输出地址、输出数据、输入的数据全部进入 Bridge 里面,然后 Bridge 会根据地址判断到底是往哪里写,又反馈给 CPU 什么数据
不用担心越界的问题,这次的 DM 和 Timer 都是助教给的,他们已经考虑的很全面了
# 顶层 Mips 微系统
最后 mips.v 中实例化 CPU,Bridge,TC0 和 TC1 三个模块相互交互
利用这样两句实现写 0x7f20,停止中断使能(2021 新增!)

# 课上测试说明
就是强测一下,按照我上面提到的注意点,根本不会出现任何问题
加的那条指令描述如下:
tltiu $t0, imm16 ,如果 GPR [rs] < imm16,那么会产生 Trap (EXCCode = 13) 的异常,imm16 符号扩展
解法如下
- 加一下 Trap 异常,就是在 def.v 里面定义一下
- 决定在哪里处理异常,反正我是在 E 级,然后把它放进 calc_i 类指令里,自动转发阻塞支持
- 在 ALU 里面加一句判断,多连出来一个异常指示信号
- 重点在这里:我们已经把它归入 calc_i 类,但是这条指令不应当写寄存器,因此在要写的寄存器编号那里需要特判一下,把这条指令要写的寄存器特判为 0
- 然后就搞定了
# 思考题参考答案
我们计组课程一本参考书目标题中有 “硬件 / 软件接口” 接口字样,那么到底什么是 “硬件 / 软件接口”?(Tips:什么是接口?和我们到现在为止所学的有什么联系?)
“硬件 / 软件接口” 是指令(机器码)。硬件实现了一些功能,并按照规约可以被相应的指令所操控。软件通过规约使用相应的指令操控硬件完成相应的功能,从而达到软件所期望的效果。指令在这个过程中实现了硬件软件的对接,因此是 “硬件 / 软件接口”。
BE 部件对所有的外设都是必要的吗?
不是,只有对字节 / 半字有存取需求的才有必要。
请阅读官方提供的定时器源代码,阐述两种中断模式的异同,并分别针对每一种模式绘制状态转移图。
见计时器说明文档。
请开发一个主程序以及定时器的 exception handler。整个系统完成如下功能:
定时器在主程序中被初始化为模式 0;
定时器倒计数至 0 产生中断;
handler 设置使能 Enable 为 1 从而再次启动定时器的计数器。2 及 3 被无限重复。
主程序在初始化时将定时器初始化为模式 0,设定初值寄存器的初值为某个值,如 100 或 1000。(注意,主程序可能需要涉及对 CP0.SR 的编程,推荐阅读过后文后再进行。)
.text li $12, 0x0401 mtc0 $12, $12 li $1, 100 li $2, 9 sw $1, 0x7f04($0) sw $2, 0x7f00($0) dead_loop: j dead_loop nop .ktext 0x4180 li $1, 100 li $2, 9 sw $1, 0x7f04($0) sw $2, 0x7f00($0) eret
请查阅相关资料,说明鼠标和键盘的输入信号是如何被 CPU 知晓的?
鼠标和键盘产生中断信号,进入中断处理区的对应位置,将输入信号从鼠标和键盘中读入寄存器。